Apollo 的 Planning 模块以 Routing 模块产生一条当前位置到终点的理想路径作为输入,结合当前场景下的路况信息(信号灯、短期内障碍物的运动轨迹等),生成短期内的一条驾驶路径。
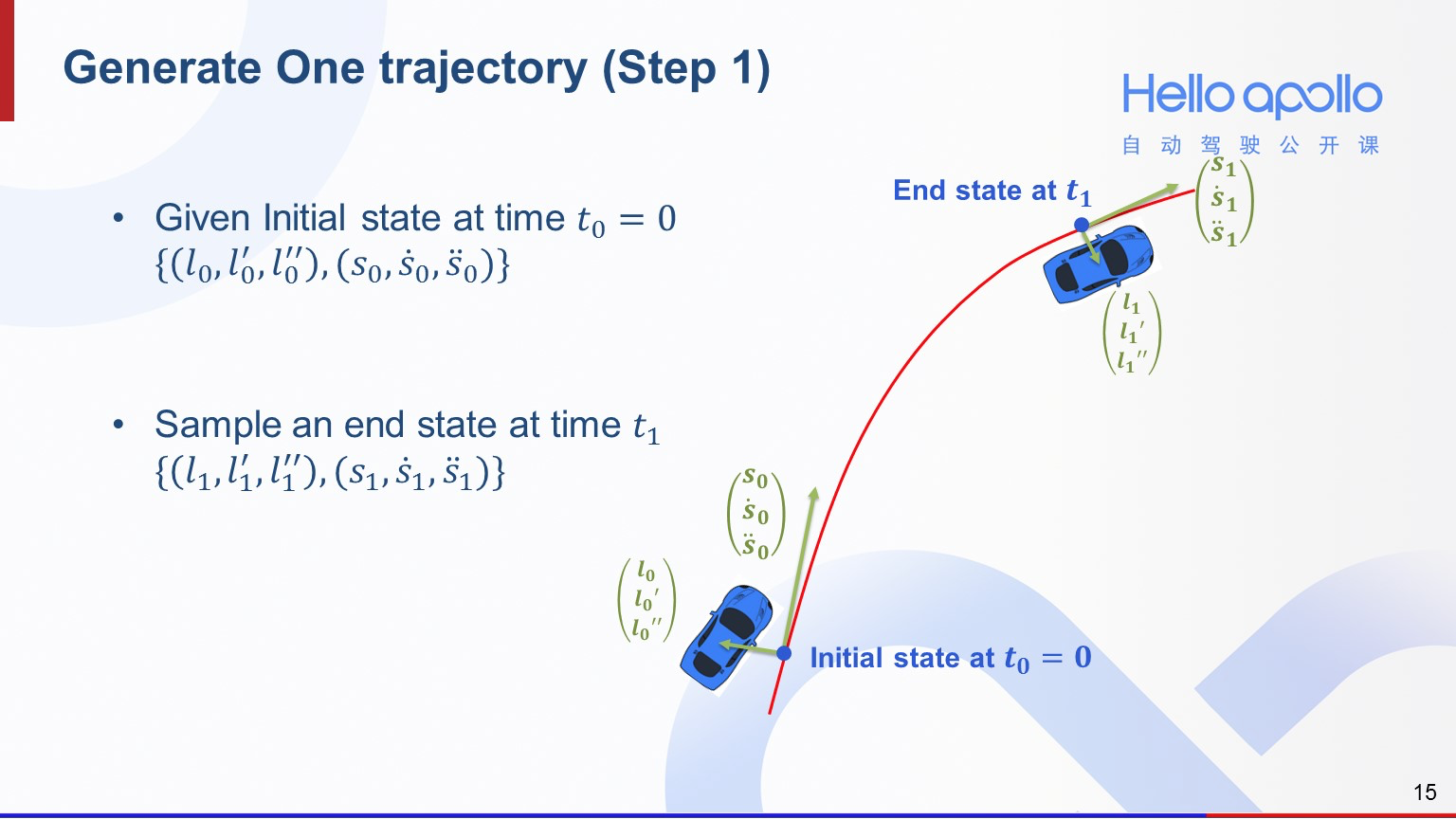
在展开之前先介绍下 Apollo 主要采用的 Frenet 坐标系,见下图,整个坐标系基于一条光滑的参考线(右图中红线),然后将汽车的坐投影到参考线上,得到一个参考线上的投影点(图中蓝色点)。从参考线起点到投影点的路径长度就是汽车在 Frenet 坐标系下的纵向偏移量,用 S 表示。而投影点到汽车位置的距离则是汽车在Frenet坐标系下的横向偏移量,用 L 表示。通过汽车的朝向、速度、加速度也可以计算出 Frenet 坐标系下,横向和纵向偏移量的一阶导和二阶导。
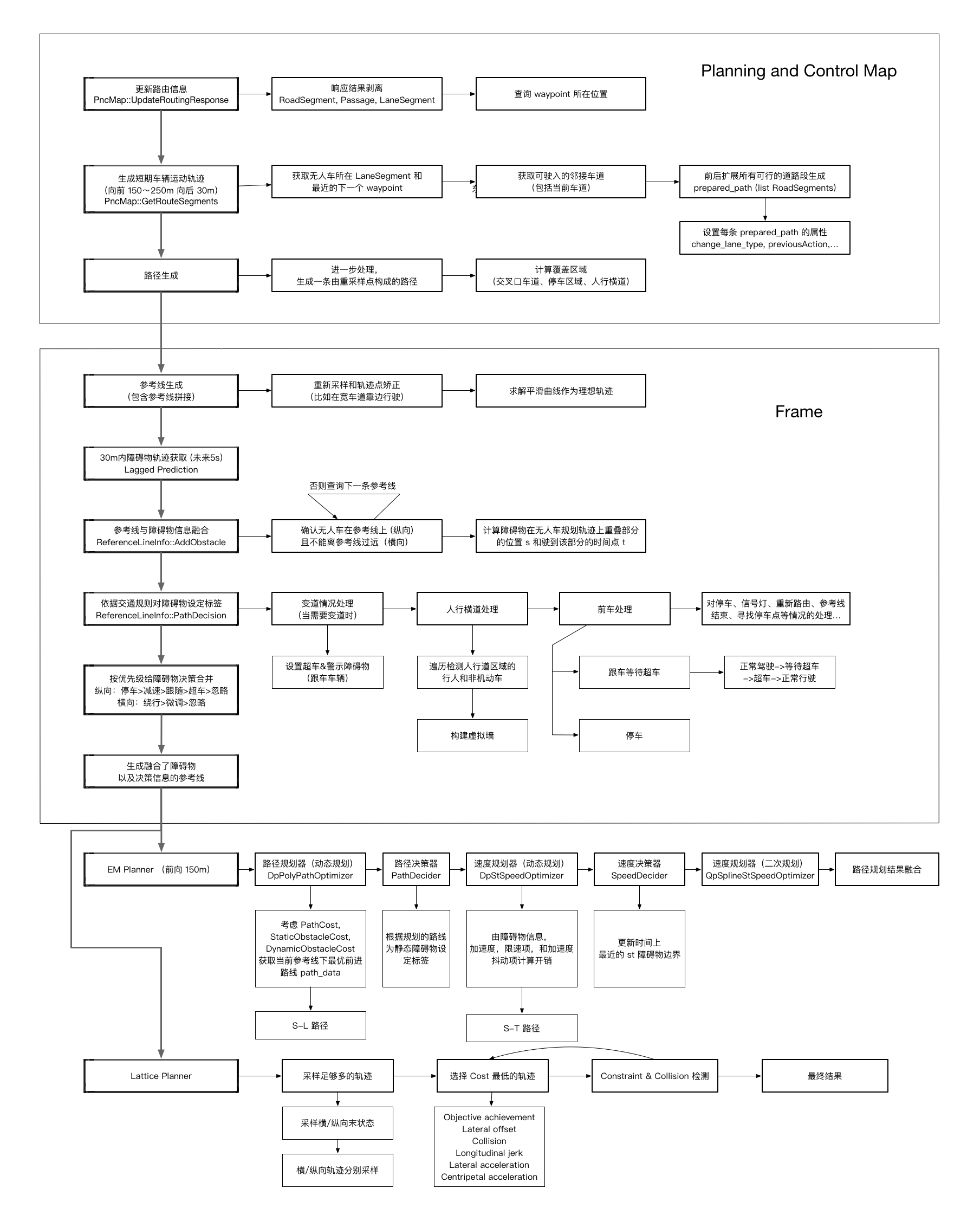
Planning 模块的主要流程如下(最下面有大致流程图):
- 从 Routing 模块获取全局路径
- 使用全局路径通过
Planning and Control (PnC) Map生成多条未经平滑的参考线,范围为车辆后方 30m 至前方 150~250m - 进行参考线平滑(也包括了参考线复用、拼接、收缩等操作)
Frame类初始化使用PnC Map生成的参考线- 融合从感知模块获取的障碍物信息
PathObstacle和障碍物(以及交规)对路径的决策影响PathDecision构成ReferenceLineInfo类 - 基于参考线信息和其中障碍物未来时刻的轨迹信息,规划器(
EM planner或Lattice planner)会生成一条未来短距离内(如 40m)的最优规划路径PathData(S-L 序列),以及短时间内(如 8s, 150m)的速度规划序列SpeedData(S-T 序列) - 融合两者得到短时间内最优路径 (S-L-T序列)交由
Control模块处理。
PnC Map 主要做的事是生成参考线,这里参考线可以直接看作是车道中心线,通常会对当前车道和当前车道可驶入的邻接车道(该邻接车道也需存在于全局规划的路径中)分别生成参考线供后续模块使用。
在 Frame 类中,因为 PnC Map 给出的参考线实质上是一系列的点,所以会首先对每条参考线进行光滑处理,这里也涉及到了跨车道(如路口、分流、汇流等)情况下的参考线拼接。然后从感知模块获取障碍物信息进行滞后预测(lagged prediction),即除了使用 Prediction 模块发布的最新一次信息,还会考虑障碍物的历史轨迹预测数据以供更精确地预测。再将障碍物的轨迹信息加入到参考线中,并判断每个障碍物对自身轨迹规划产生的决策影响(纵向:忽略,停车,超车,减速,跟车;横向:忽略,微调,绕行)。
这里只是简单介绍了 Apollo 中的路径规划过程,更多细节可以参见 Github 中已开源的代码,为了更好地了解也可以进一步阅读下面的参考资料。
Reference